


 9
9
當(dāng)前位置:上海育仰科教設(shè)備有限公司>>汽車底盤實訓(xùn)設(shè)備>> YUY-JG23汽車四輪轉(zhuǎn)向系統(tǒng)實訓(xùn)臺



YUY-JG23汽車四輪轉(zhuǎn)向系統(tǒng)實訓(xùn)臺

本實驗臺選用汽車四輪轉(zhuǎn)向系統(tǒng)實物的組成結(jié)構(gòu),,可進行四輪定位檢測與調(diào)整,模擬高速,、中速,、低速時的轉(zhuǎn)向狀態(tài),充分演示原車轉(zhuǎn)向系統(tǒng)的工作過程及原理,。能夠滿足對四輪轉(zhuǎn)向系統(tǒng)的結(jié)構(gòu)組成,,工作原理,,實踐操作等教學(xué)所需。
一,、汽車四輪轉(zhuǎn)向系統(tǒng)實訓(xùn)臺主要組成:
前后懸架、 方向機,、輪胎、 助力泵,、轉(zhuǎn)向電機、方向盤、壓力表,、轉(zhuǎn)向刻度盤、座椅,、可移動臺架,,配套使用說明書和實驗指導(dǎo)書等。
二,、主要功能:
1.可模擬汽車在不同車速時四輪轉(zhuǎn)向的工作情況,,并配有轉(zhuǎn)交盤可顯示轉(zhuǎn)向角度的大小,可進行動力轉(zhuǎn)向和非動力轉(zhuǎn)向?qū)嶒?,配合四輪定位儀可做四輪定位實驗,;
2.通過拆裝實習(xí),充分學(xué)習(xí)轉(zhuǎn)向系的結(jié)構(gòu)原理,,裝配技巧,掌握轉(zhuǎn)向系統(tǒng)的調(diào)整內(nèi)容,、方法及組裝順序;同時可方便地檢測裝配的效果和質(zhì)量,;
3.演示原車轉(zhuǎn)向系統(tǒng)的工作過程及轉(zhuǎn)向系統(tǒng)基本結(jié)構(gòu)組成和工作原理,;
4.可進行四輪定位檢測與調(diào)整,,四輪定位三要素的調(diào)整和作用。
三,、制作工藝:
1、帶鎖定的萬向腳輪移動裝置,,移動自如,便于教學(xué),;
2,、臺架選用國標優(yōu)質(zhì)鋼結(jié)構(gòu)焊接,,高檔汽車高溫烤漆處理,美觀大方,,經(jīng)久耐用,;
3、安裝有關(guān)轉(zhuǎn)動元器件的安全防護網(wǎng),;
四、四輪轉(zhuǎn)向系統(tǒng)
四輪轉(zhuǎn)向系統(tǒng)中的后輪也可以轉(zhuǎn)向,;后輪轉(zhuǎn)向根據(jù)車輛速度(或者轉(zhuǎn)向盤的轉(zhuǎn)角)來控制,。
在車速較低(或轉(zhuǎn)向盤轉(zhuǎn)角很大)時,,后輪的轉(zhuǎn)向與前輪相反。
當(dāng)車輛行駛速度較高(或轉(zhuǎn)向盤轉(zhuǎn)角較?。r,后輪的轉(zhuǎn)向與前輪相同,。
電控四輪轉(zhuǎn)向
在電子控制的四輪轉(zhuǎn)向系統(tǒng)中,,前輪轉(zhuǎn)向器和后輪轉(zhuǎn)向執(zhí)行器之間沒有任何機械連接裝置,,后輪轉(zhuǎn)向執(zhí)行器由轉(zhuǎn)向電子控制模塊來控制。
電子控制系統(tǒng)中的四輪轉(zhuǎn)向系統(tǒng)利用轉(zhuǎn)向盤轉(zhuǎn)動速度,、車輛行駛速度和前輪轉(zhuǎn)角的信息來計算并控制后輪轉(zhuǎn)角。
1.后輪轉(zhuǎn)向執(zhí)行器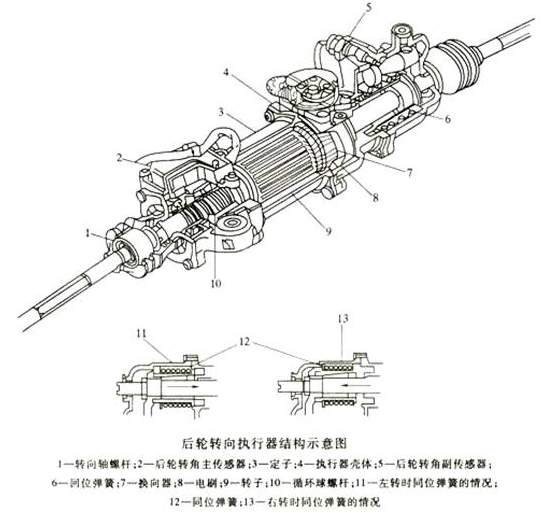
包含一個通過循環(huán)球螺桿機構(gòu)驅(qū)動轉(zhuǎn)向齒條的電動機,。
2、傳感器
(1)后輪轉(zhuǎn)角主傳感器
位于后輪轉(zhuǎn)向執(zhí)行器左側(cè)
包括脈沖環(huán)(隨循環(huán)球螺桿旋轉(zhuǎn))和霍爾傳感元件
當(dāng)脈沖環(huán)旋轉(zhuǎn)時,,霍爾傳感元件向電子控制模塊發(fā)出脈沖數(shù)字電壓信號,,顯示后輪轉(zhuǎn)角。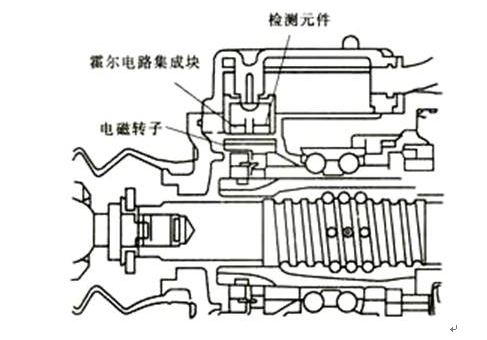
(2)后輪轉(zhuǎn)角副傳感器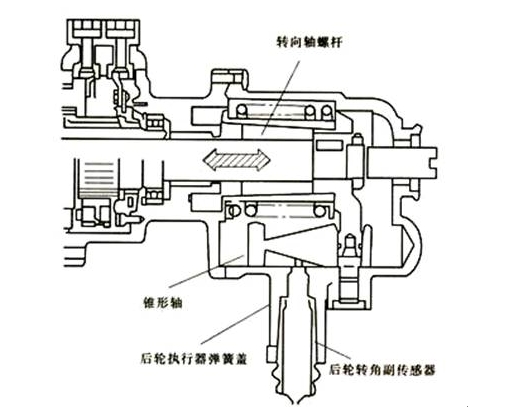
(3)轉(zhuǎn)向盤轉(zhuǎn)向傳感器
一般采用霍爾效應(yīng)原理
能夠檢測轉(zhuǎn)向盤的轉(zhuǎn)動方向,、轉(zhuǎn)動速度和轉(zhuǎn)動角度
轉(zhuǎn)向盤轉(zhuǎn)動時,,轉(zhuǎn)向傳感器向電子控制模塊傳送前輪轉(zhuǎn)動的信號




